Epita:Algo:Cours:Info-Spe:les connexités
Rappels :
- Un graphe non orienté est connexe si pour toute paire de sommets disjoints u et v, il existe une chaîne (u
 v) reliant ces deux sommets.
v) reliant ces deux sommets.
- Un graphe orienté est fortement connexe si pour toute paire ordonnée de sommets disjoints u et v, il existe un chemin de u vers v (u
 v).
v).
Dans ce chapitre, nous allons présenter des algorithmes permettant de déterminer les composantes connexes de graphes non orientés. Puis, nous nous placerons dans le cadre de graphes orientés et donc de l'extraction des composantes fortement connexes.
On peut bien sur vouloir être plus exigeant et désirer qu'un graphe reste connexe, même après la suppression d'un ou plusieurs de ses sommets quelconques. Cela s'appelle la p-connexité, p étant un entier représentant le nombre maximum de sommets pouvant êtr retirés tout en conservant la propriété de connexité du graphe. Nous nous limiterons à p=2.
Sommaire |
Composantes connexes
Cette section traitera de l'extraction des composantes connexes d'un graphe non orienté G défini par un couple < S, A >. L'analyse du résultat est toujours la même; Si en sortie nous n'avons qu'une seule composante, le graphe est connexe, sinon nous pouvons déterminer les sommets membres de chaque composante et donc ceux pour lesquels il existe une relation chaîne ().
Remarque : Nous partirons du principe que l'ensemble de sommets S est statique (fixé) et que l'ensemble des arêtes A peut être statique ou évolutif.
Cas statique
Les trois moyens de déterminer les composantes connexes d'un graphe non orienté statique (S et A fixés) sont le parcours en profondeur, le parcours en largeur et le calcul de la fermeture transitive. Nous connaissons les deux premiers, nous allons découvrir le troisième.
Parcours en profondeur
A l'issu du parcours en profondeur, nous examinons la forêt couvrante associée à celui-ci. S'il n'y a qu'une arborescence, le graphe est connexe, sinon il y a autant de composantes connexes qu'il y a d'arborescences et les sommets de chacune d'elles sont les noeuds qui les composent.
Parcours en largeur
Le principe est globalement le même que pour le parcours en profondeur, seul l'ordre de rencontre des sommets varie (ordre hiérarchique).
Fermeture transitive
Calculer la fermeture transitive d'un graphe sert à déterminer si ce graphe est connexe.
Définition: On appelle fermeture transitive d'un graphe G défini par le couple < S, A >, le graphe G* défini par le couple < S, A* > tel que pour toutes paires de sommets x, y  S, il existe une arête {x,y} dans G* si-et-seulement-si il existe une chaîne entre x et y dans G.
S, il existe une arête {x,y} dans G* si-et-seulement-si il existe une chaîne entre x et y dans G.
Remarques :
- La fermeture transitive G* d'un graphe connexe G est un graphe complet
- Un graphe G est connexe si sa fermeture transitive G* est un graphe complet
- Deux sommets x, y sont de la même composante connexe de G si-et-seulement-si il existe une arête {x,y} dans la fermeture transitive G* de G.
Spécification formelle
Nous allons réaliser la construction de la fermeture transitive par itérations successives. C'est à dire que pour tester l'existence d'une chaîne entre deux sommets x et y, nous allons vérifier s'il en existe une qui passe par le sommet s1, puis s'il en existe une qui passe par les sommets s1 et s2, etc. Finalement s'il en existe une qui passe par tous les sommets du graphe.
Remarque : Si les sommets sont des entiers (1, 2, 3, ...) l'opération de calcul de la fermeture transitive se traduit par une simple itération.
On définit alors les opérations itérer et fermeturetransitive :
opérations
fermeturetransitive : graphegraphe itérer : entier x graphe
axiomes
/* Un graphe a le même ensemble de sommets que sa fermeture transitive */ s estunsommetde itérer(i,g) = s estunsommetde itérer(i-1,g)
<s,s'> estunearêtede itérer(i,g) = <s,s'> estunearêtede itérer(i-1,g) | (<s,i> estunearêtede itérer(i-1,g) & <i,s'> estunearêtede itérer(i-1,g)) <s,s'> estunearêtede fermeturetransitive(g) = <s,s'> estunearêtede itérer(nbsommets(g),g)
avec
graphe g entier i /* i > 0 */ sommet s, s' /* s et s' sommets de g */
Algorithme de WARSHALL
Principe :
Comme le montrent les axiomes précédents, il existe une chaîne allant d'un sommet s à un sommet s' en passant par des sommets inférieurs ou égaux à i, soit :
- s'il existe une chaîne allant d'un sommet s à un sommet s' en passant par des sommets inférieurs ou égaux à i-1,
- s'il existe une chaîne allant d'un sommet s à un sommet i en passant par des sommets inférieurs ou égaux à i-1 et s'il existe une chaîne allant d'un sommet i à un sommet s' en passant par des sommets inférieurs ou égaux à i-1.
Soit c la matrice d'adjacence de G, en suivant la spécification, nous pouvons déterminer la matrice c* de G*. Supposons que ci[s,s'] représente l'existence d'une chaîne allant de s' à s' passant par des sommets inférieurs ou égaux à i, on a alors :
ci[s,s'] = ci-1[s,s'] ou (ci-1[s,i] et ci-1[i,s'])
Pour l'algorithme qui suit, le type de données employé est le suivant :
Constantes
Nbs = ... /* Nombre de sommets du graphe */
Types
t_matNbsNbsbool = Nbs x Nbs booléen /* Matrice booléenne carrée de Nbs sommets */
Ce qui donne:
Algorithme procédure Warshall Paramètres locaux t_matNbsNbsbool c /* Matrice d'adjacence du graphe g */ Paramètres locaux t_matNbsNbsbool c2 /* Matrice d'adjacence du graphe g* */ Variables entier i, s, s2 /* i, s et s2 sont des sommets */ Début /* Initialisation de C2 */ pour s1 jusqu'à Nbs faire pour s2
/* Calcul de C2 (fermeture-transitive) */ pour i
Remarque : Dans l'algorithme, nous n'utilisons qu'une seule matrice C2 pour calculer les valeurs successives de Ci. En effet, Ci[s,s'] vaut déjà Ci-1[s,s'] avant chaque nouvelle évaluation. L'utilisation de l'opérateur ou nous garantit la conservation des valeurs vrai qui auraient été obtenues lors des itérations précédentes.
Cas évolutif
Un graphe non orienté de n sommets peut être connu par la donnée successive de ses arêtes. Les composantes connexes du graphe peuvent alors être obtenues par regroupement successifs des composantes connexes du graphe en évolution.
L'ajout d'une arête x − − − y peut, en effet, modifier l'ensemble des composantes connexes d'un graphe en réunissant celle de x avec celle de y si elles sont distinctes.
On doit alors être capable :
- de dire à quelle composante connexe appartient un sommet donné,
- de savoir si deux sommets appartiennent ou non à une même composante,
- de réunir deux composantes connexe en une seule.
Remarque : Déterminer les composantes connexes d'un graphe G, c'est déterminer l'ensemble des classes d'équivalence pour la relation d'équivalence chaîne, ou x chaîne y est vrai si-et-seulement-si il existe une chaîne entre les deux sommets x et y.
De manière plus générale, on utilise les fonctions trouver et réunir pour construire la partition associée à une relation d'équivalence évolutive (relation dont les instances sont connues progressivement).
Ces deux fonctions sont utilisées de la manière suivante :
- trouver associe à tout élément de l'ensemble sur lequel est défini la relation d'équivalence un élément privilégié de sa classe d'équivalence (le représentant de la classe)
- réunir rassemble deux classes d'équivalence distinctes en une seule.
Spécification formelle
Un ensemble muni d'une relation d'équivalence peut être considéré comme un graphe non orienté qui vérifie certaines propriétés. Les éléments de l'ensemble sont alors représentés par les sommets et la relation d'équivalence par la relation arête.
Remarque : S'il s'agit de graphes non orientés, la propriété de symétrie résulte des axiomes.
En fait, on ne connaît pas toute la relation d'équivalence, mais seulement certaines occurrences données progressivement.
Comme on sait que c'est une relation d'équivalence, l'ajout explicite d'une seule occurrence (celui d'une arête dans le graphe G) s'accompagne de l'ajout implicite d'un certain nombres d'autres occurrences (d'autres arêtes dans le graphe G*).
Cela revient à construire la fermeture réflexive et transitive du nouveau graphe.
Appelons fermeture l'opération qui effectue la construction dela fermeture réflexive et transitive d'un graphe. Sa spécification utilise l'opération fermeturetransitive spécifiée précédemment.
On a donc, pour fermeture, trouver et réunir les définitions suivantes :
opérations
fermeture : graphe
préconditions trouver(s,g) est défini ssi s estunsommetde g = Vrai & g = fermeture(g) réunir(s,s',g) est défini ssi s estunsommetde g = Vrai & s' estunsommetde g = Vrai & g = fermeture(g)
axiomes
(* Un graphe a le même ensemble de sommets que sa fermeture *) s estunsommetde fermeture(g) = s estunsommetde g) (* Réflexivité *) s estunsommetde g = Vrai<s,s> estunearêtede fermeture(g) = Vrai (* Transitivité *) s ≠ s'
avec
graphe g sommet s, s' (* s et s' sommets de g *)
Algorithmes de base
Principe :
Nous allons représenter les classes d'équivalence sous la forme d'une forêt. Chaque arbre de cette forêt a pour racine le représentant de la classe qu'il représente (l'arbre). Dans ce cas trouver(x,G) revient à chercher l'arbre qui contient x et à retourner la racine de cet arbre. Si on connaît le père de chaque élément, cela devient enfantin (c'est vrai :)). De plus, pour réunir deux classes d'équivalence, il suffit d'accrocher un des arbres à la racine de l'autre (c'est ce que je disais, un enfant de 5 ans y arriverait).
Algorithme :
Pour représenter la forêt, nous allons utiliser un tableau de n entiers, appelé pere, représentants les ascendants directs des noeuds dans la forêt. Si un noeud i [1,n] a pour père un noeud j [1,n], on aura pere[i] = j. Si un noeud i [1,n] n'a pas de père, à ce moment là, on aura pere[i] = -1.
Remarques :
- Cette valeur servira de sentinelle lors de la recherche de la racine d'une arborescence. En effet, la racine d'un arbre est le seul noeud qui n'a pas de père.
- Si au départ, toutes les classes d'équivalence sont réduites à des singletons, notre tableau pere verra tous ses éléments initialisés à -1.
Pour les algorithmes qui suivent, le type de donnée employé est le suivant :
Constantes
Nbs = ... /* Nombre de sommets du graphe */
Types
t_vectNbsEnt = Nbs entier /* Vecteur d'entiers mémorisant l'ascendant direct */
Ce qui donne pour trouver :
/* trouver(x, pere) retourne la racine de l'arbre contenant x */ Algorithme fonction trouver : entier Paramètres locaux entier x t_vectNbsEnt pere /* Vecteur d'ascendance */ Début tant que pere[x] > 0 faire x
Et pour réunir :
/* réunir(x, y, pere) accroche la racine de l'arbre contenant y */ /* à la racine de celui contenant x, s'ils sont distincts */ Algorithme procédure réunir Paramètres locaux entier x,y Paramètres globaux t_vectNbsEnt pere /* Vecteur d'ascendance */ Variables entier rx,ry Début rx
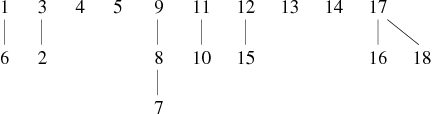
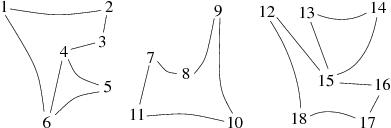
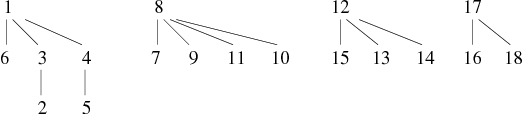
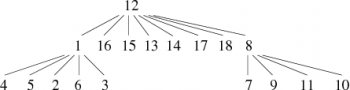
Nous allons présenter un exemple de construction de graphe par ajouts successifs d'arêtes. Ce graphe possède 18 sommets et ses arêtes sont connues progressivement dans l'ordre suivant:
1 − − − 6, 3 − − − 2, 8 − − − 7, 12 − − − 15, 17 − − − 16, 11 − − − 10, 9 − − − 8, 17 − − − 18, 11 − − − 7, 1 − − − 2, 4 − − − 5, 13 − − − 15, 10 − − − 9, 15 − − − 14, 4 − − − 6, 13 − − − 14, 16 − − − 15, 3 − − − 4, 5 − − − 6, 18 − − − 12
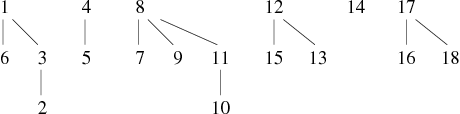
Nous découperons la construction de ce graphe en 4 phases, ce qui nous permettra de mieux comprendre le fonctionnement de ces algorithmes. Nous présenterons pour chaque phase d'ajouts (cf. Tableaux 1, 2, 3 et 4) , l'état du tableau pere ainsi que la forêt correspondante.
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 − − − 6, 3 − − − 2, 8 − − − 7, 12 − − − 15, 17 − − − 16, 11 − − − 10, 9 − − − 8, 17 − − − 18 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
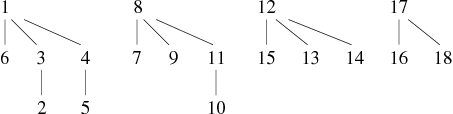
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
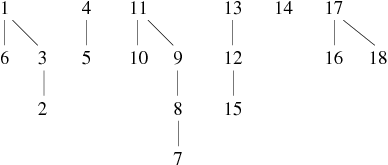
| 11 − − − 7, 1 − − − 2, 4 − − − 5, 13 − − − 15 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
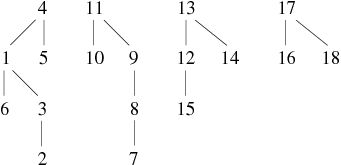
| 10 − − − 9, 15 − − − 14, 4 − − − 6, 13 − − − 14 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
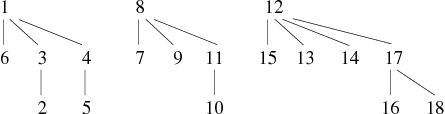
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
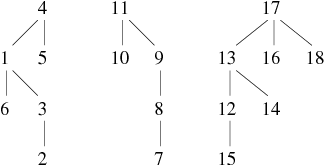
| 16 − − − 15, 3 − − − 4, 5 − − − 6, 18 − − − 12 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
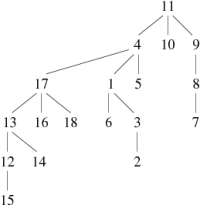
Les arbres de la forêt finale correspondent aux composantes connexes du graphe. Les liens ne sont pas forcément ceux du graphe. Sur cet exemple, le graphe réellement obtenu est celui représenté par la figure 1 (il est à noter que weJ signifie trois en Klingon, délire non ?).
|
On peut voir que la forêt obtenue à une profondeur maximale de 3 pour 18 sommets. La forme obtenue est assez compacte. Malheureusement, ce n'est pas toujours le cas. Par exemple, si l'on prend un graphe de n sommets dont les n-1 arêtes sont données dans l'ordre suivant :
2 − − − 1, 3 − − − 1, ... , (i-1) − − − 1, i − − − 1, ... , n − − − 1
La forêt obtenue par appels successifs de la procédure réunir est constituée d'un unique arbre de hauteur n-1 et de racine n (arbre dégénéré). Dans ce cas, la complexité au pire de trouver est Θ(n). Cela revient à dire que tester l'appartenance d'un sommet à une composante connexe (classe d'équivalence) peut prendre au pire n comparaisons.
Pour éviter cela, on propose deux améliorations qui combinées donnent quelque chose de très performant. La première est :
L'union pondérée
L'idée est la suivante: Au cours de l'ajout d'une arête x − − − y, au lieu d'accrocher systématiquement l'arbre contenant y à la racine de celui contenant x, nous allons accrocher celui de plus petite taille (contenant le moins d'éléments) à la racine de celui de plus grande.
On appelle cela l'union pondérée de deux arbres.
Algorithme :
La difficulté est de trouver un moyen rapide (voire instantané) de connaître la taille d'un arbre à n'importe quel moment. L'astuce est la suivante : Pour représenter la forêt, nous allons, là aussi, utiliser le tableau pere. La différence est que si un noeud i [1,n] n'a pas de père, à ce moment là, on aura pere[i] = -taille avec taille le nombre d'éléments contenus dans l'arbre dont pere[i] est racine (représentant).
Remarque : De la même manière, au départ toutes les classes d'équivalence étant réduites à des singletons, notre tableau pere verra tous ses éléments initialisés à -1.
Ce qui donne pour réunir :
/* réunir(x, y, pere) accroche la racine de l'arbre de plus petite taille */ /* à la racine de celui de plus grande taille s'ils sont distincts */ Algorithme procédure réunir Paramètres locaux entier x,y Paramètres globaux t_vectNbsEnt pere /* Vecteur d'ascendance */ Variables entier rx,ry Début rx
Remarque : Si les deux arbres font la même taille, on retombe sur le système de base, à savoir accroche du deuxième arbre à la racine du premier.
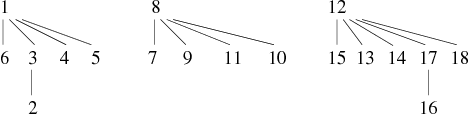
Reprenons l'exemple précédent de construction de graphe par ajouts successifs d'arêtes. Conservons la découpe en 4 phases et observons les résultats de l'application de la nouvelle procédure réunir (cf. Tableaux 5, 6,7 et 8).
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 − − − 6, 3 − − − 2, 8 − − − 7, 12 − − − 15, 17 − − − 16, 11 − − − 10, 9 − − − 8, 17 − − − 18 |

| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 11 − − − 7, 1 − − − 2, 4 − − − 5, 13 − − − 15 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 − − − 9, 15 − − − 14, 4 − − − 6, 13 − − − 14 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 16 − − − 15, 3 − − − 4, 5 − − − 6, 18 − − − 12 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
La forêt obtenue maintenant à une profondeur maximale de 2, ce qui est compte tenu de la faible taille du graphe une amélioration notable.
Cela dit, nous pouvons rendre la méthode encore plus efficace en compactant encore plus les formes d'arbres obtenues. C'est la deuxième amélioration, on l'appelle :
La compression de données
L'idée est la suivante: A chaque appel de la fonction trouver pour un sommet x, on accroche directement à la racine de l'arbre contenant x tous les sommets (x compris) se trouvant sur le chemin allant de x à cette racine.
Pour cela nous allons utiliser une nouvelle fonction trouver, ce qui donne :
/* trouver(x, pere) retourne la racine rx de l'arbre contenant x */ /* et effectue la compression du chemin de x vers rx'' */ Algorithme fonction trouver : entier Paramètres locaux entier x Paramètres globaux t_vectNbsEnt pere /* Vecteur d'ascendance */ entier rx Variables entier y Début rx
Si l'on combine ces deux améliorations on obtient ce que l'on appelle : L'union compressée et pondérée.
En conservant l'exemple précédent de construction de graphe par ajouts successifs d'arêtes, nous observons les résultats suivants : Les deux premières phases sont identiques à la précédente méthode, la différence intervient à partir de la troisième phase (cf. Tableaux 9 et 10).
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 − − − 9, 15 − − − 14, 4 − − − 6, 13 − − − 14 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
| Arêtes | Forêt obtenue | ||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 16 − − − 15, 3 − − − 4, 5 − − − 6, 18 − − − 12 |
| ||||||||||||||||||||||||||||||||||||||
| Vecteur pere | |||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||
On constate quelques variations comme le fait que le sommet 10 est accroché directement au 8. En effet, l'ajout de l'arête 10 − − − 9 ne modifie pas l'ensemble des classes d'équivalence (composantes connexes). Il ne se passait donc rien avec la première version de trouver. En revanche, la deuxième version (qui compresse) en profite quand même pour modifier la forêt. La hauteur de cette dernière à toujours un maximum à 2, mais sa profondeur moyenne à baissée.
Sur cet exemple, ce n'est pas forcément très probant, mais si maintenant arrivé à la phase 4, nous ajoutions successivement les arêtes 2 − − − 16 et 10 − − − 18, nous obtiendrions, suivant les trois méthodes, les forêts représentées figure 2.
| Méthode de base | Union pondérée | Union pondérée et compression |
|---|---|---|
|
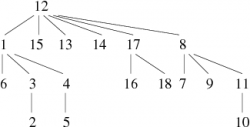
|
|
Lorsque l'on construit les classes d'équivalence d'un ensemble de n éléments par unions pondérées et compressions de données successives, trouver la classe d'équivalence d'un élément, ou tester si deux éléments appartiennent à la même classe, demande une complexité quasi-constante au pire.
Pour toute suite d'opérations qui sont des unions pondérées et des compressions de données, si l'on a m opérations trouver, la complexité en temps est au pire Θ(n +m.α (m + n, n)), avec α (u, v) une fonction qui croît très lentement, beaucoup plus lentement qu'une fonction logarithmique (elle est définie comme l'inverse de la fonction d'Ackermann). Dans la pratique, on peut considérer α (u, v) ≤ 4.
Pour conclure, on peut tester une fois que la forêt est construite si le graphe est connexe au pire en Θ(n), avec n le nombre de sommets (trouver est appelée pour chaque sommet).
Remarque : C'est un peu plus couteux que le parcours en profondeur, mais il n'y a pas besoin de stocker les arêtes du graphe.
Composantes fortement connexes
Nous allons maintenant envisager deux méthodes permettant de déterminer les composantes fortement connexes (cfc) d'un graphe orienté, et donc de déterminer s'il est fortement connexe. Ce sont les algorithmes de Kosaraju et de Tarjan.
- La première méthode est basée sur un double parcours profondeur avec inversion de graphe,
- la deuxième utilise un seul parcours profondeur en s'aidant d'une pile.
Algorithme de Kosaraju (double parcours et inversion de graphe)
Principe :
Supposons un graphe G orienté. Notre algorithme composantefortementconnexe va s'appuyer sur deux procédures de parcours : parcprofsuff et parcprofinv qui vont respectivement réaliser les choses suivantes :
parcprofsuff : effectue le parcours en profondeur du graphe G tout en construisant une liste L des sommets rencontrés en ordre suffixe. Comme de coutume, On commence arbitrairement sur le sommet 1 et on traite les autres en ordre croissant de succession.
parcprofinv : effectue le parcours en profondeur du graphe inverse G-1 et construit le vecteur cfc associant à chaque sommet son numéro de composante fortement connexe. Pour cela, on utilise la liste L de sommets précédemment créée en ordre décroissant. C'est à dire que l'on commence par le dernier élément de L (le sommet de plus grande valeur suffixe dans le parcours profondeur de G) et l'on remonte sur les précédents non marqués (lors des retours d'appels).
Remarques :
- Les numéros suffixes (ordre pour G) des racines des arborescences de la forêt couvrante de G-1 sont donc en ordre décroissant.
- Les sous-graphes engendrés par les sommets des arborescences de la forêt couvrante de G-1 ainsi obtenue, forment les composantes fortement connexes de G.
Algorithme :
Pour les algorithmes qui suivent, les types de données employés sont les suivants :
Constantes
Nbs = ... /* Nombre de sommets du graphe */
Types
t_vectNbsEnt = Nbs entier /* Vecteur d'entiers */ t_vectNbsBool = Nbs booléen /* Vecteur de booléens */
Ce qui donne pour l'algorithme principal composantefortementconnexe :
/* Après l'exécution cfc[i] contiendra le numéro de la composante fortement connexe */ /* à laquelle appartient le sommet i */ Algorithme procédure composantefortementconnexe Paramètres locaux graphe g Paramètres globaux t_vectNbsEnt cfc /* Vecteur de composantes fortement connexes */ Variables t_vectNbsEnt lsom /* Liste des sommets */ t_vectNbsBool marque /* Vecteur de marquage de sommets */ entier i,k Début /* Initialisation */ pour i
Pour la procédure parcprofsuff :
/* parcprofsuff(x,g,m,l,k) où x est le sommet racine, k est le compteur de sommets */ /* m le tableau de marque et l la liste de sommets rencontrés en ordre préfixe */ Algorithme procédure Parcprofsuff Paramètres locaux entier x graphe g Paramètres globaux t_vectNbsBool m /* Vecteur de marquage de sommets */ t_vectNbsEnt l /* Liste des sommets */ entier k Variables entier i,y /* y est un sommet */ Début m[x]
Et pour la procédure parcprofinv:
/* parcprofinv(x,g,m,cfc,k) parcours en profondeur le graphe inverse */ /* et remplit le tableau cfc par la valeur k; x est un sommet */ Algorithme procédure parcprofinv Paramètres locaux entier x graphe g Paramètres globaux t_vectNbsBool m /* Vecteur de marquage de sommets */ t_vectNbsEnt cfc /* vecteur de composantes fortement connexes */ entier k Variables entier i,y /* y est un sommet */ Début m[x]
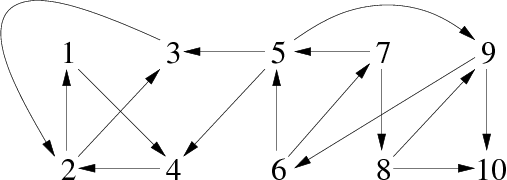
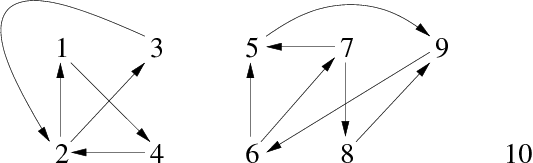
Prenons pour exemple le graphe G de la figure 3:
|
Après exécution de l'algorithme parcprofsuff, nous obtenons la liste lsom suivante (représentée sous la forme d'un vecteur pour en faciliter la lecture) :
| Ordre suffixe (indice) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Sommets | 3 | 2 | 4 | 1 | 10 | 8 | 7 | 6 | 9 | 5 |
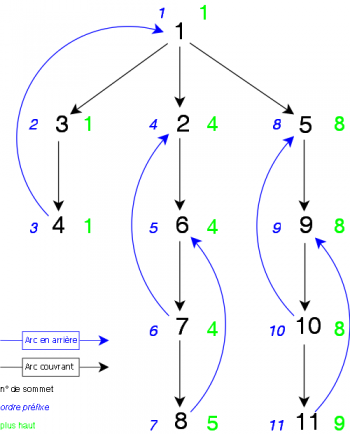
L'exécution de ce parcours aurait pu être représenté graphiquement comme sur la figure 4. Si l'on conserve uniquement les arcs couvrants (en noir), nous visualisons la forêt couvrante associée au parcours en profondeur du graphe G, ce qui permet de facilement connaître l'ordre suffixe de rencontre des sommets du graphe. Là encore, le parcours est effectué à partir du sommet 1 et en prenant les successeurs en ordre croissant.
|
Prenons maintenant le graphe G-1 (inverse de G) présenté figure 5:
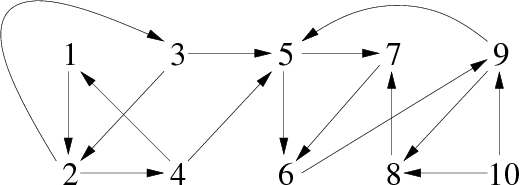
|
Après exécution de l'algorithme Parcprofinv, nous obtenons le vecteur cfc suivant (tableau 12) :
| Sommets (indice) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| N° de composante | 3 | 3 | 3 | 3 | 1 | 1 | 1 | 1 | 1 | 2 |
Remarques :
- L'ordre croissant des successeurs est conservé, en revanche le parcours a commencé à partir du sommet 5 puisqu'il est celui de plus grand N° suffixe dans lsom.
- A la fin de l'exécution, le compteur k de composante vaut 3 (nombre de composantes fortement connexes du graphe).
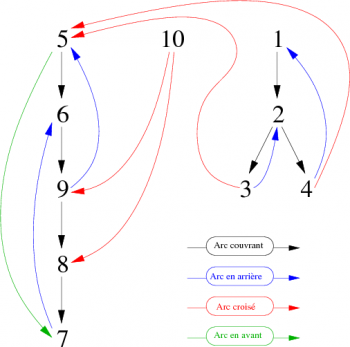
Là aussi, l'exécution de ce parcours aurait pu être représentée graphiquement comme sur la figure 6. Si l'on conserve uniquement les arcs couvrants, il devient alors aisé de repérer les arborescences correspondant aux trois composantes fortement connexes de ce graphe que l'on peut voir représentées sur la figure 7.
|
|
Algorithme de Tarjan (parcours simple et pile)
Comme nous l'avons dit précédemment, l'algorithme de Tarjan peut être optimisé pour déterminer les composantes fortement connexes d'un graphe en effectuant un seul parcours en profondeur (Il en a d'ailleurs la compléxité).
Cet algorithme exploite les propriétés des Forêts couvrantes associées au parcours en profondeur de graphes suivantes :
- Propriétés élémentaires:
- Soient x et y deux sommets d'une même composante fortement connexe, z un sommet d'un chemin de x vers y, alors z appartient à la même composante fortement connexe que x et y.
- Soient x et y deux sommets tels qu'il y ait un chemin de x vers y. Si dans un parcours en profondeur, on marque x alors que y n'est pas encore marqué, y sera dans la même arborescence que x.
- Soient x et y deux sommets d'une même composante fortement connexe, z un sommet d'un chemin de x vers y, alors z appartient à la même composante fortement connexe que x et y.
- Propriétés:
- Soient G=< S, A > un graphe orienté et Ci = < Si, Ai > une composante fortement connexe de G avec Si
 S et Ai A. Soit Bi l'ensemble des arcs couvrants de Ai dans la forêt couvrante associée au parcours en profondeur de G.
S et Ai A. Soit Bi l'ensemble des arcs couvrants de Ai dans la forêt couvrante associée au parcours en profondeur de G.
Alors Gi = < Si, Bi > est une arborescence.
Remarque: On appelle racine de la composante fortement connexe Ci, la racine ri de l'arborescence Gi associée à Ci. C'est le 1ier sommet de Gi rencontré en ordre préfixe.
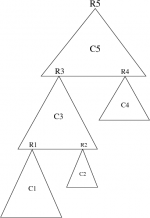
- Quel que soit i, les sommets de la composante fortement connexe Ci sont les descendants de ri dans la forêt couvrante associée au parcours en profondeur de G qui ne sont pas dans les composantes fortement connexes C1, ..., Ci-1 ( cf figure 8).
- Soient G=< S, A > un graphe orienté et Ci = < Si, Ai > une composante fortement connexe de G avec Si
|
Principe de l'algorithme:
Les racines ri étant considérées en ordre suffixe de rencontre, on obtient les sommets de la composante fortement connexe Ci en ne prenant que les sommets de l'arborescence de racine ri qui n'ont pas été déjà pris en compte dans les précédentes Composantes.
On introduit alors deux fonctions qui vont nous permettre, à l'aide des propriétés suivantes, d'exploiter cette remarque:
- prefixe(x): qui retourne pour chaque sommet x du graphe G son numéro d'ordre préfixe dans le parcours profondeur de G.
- retour(x): qui retourne pour chaque sommet x la valeur préfixe d'un sommet de la composante fortement connexe de x rencontré avant lui lors du parcours profondeur s'il existe ou alors la valeur préfixe de x lui-même.
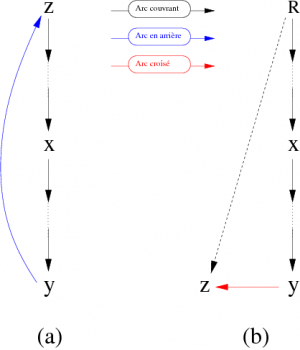
Appelons ce sommet z, pour qu'il existe (membre de la même cfc que x et tel que prefixe(z)<prefixe(x)) un tel sommet doit être (graphiquement) placé au dessus et/ou à gauche du sommet x. Cela sous-entend qu'en partant de x il faut suivre un chemin commençant par une suite (éventuellement vide) d'arcs couvrants continuée par un arc en arrière ou un arc croisé. Graphiquement: peut-on trouver un des deux cas présentés figure 9?
|
- Dans le cas (a), il est clair que, lors du parcours profondeur de la forêt couvrante, le sommet z sera rencontré avant le sommet x et que sa valeur préfixe sera donc inférieure à celle du sommet x.
- Dans le cas (b), c'est un petit peu plus compliqué, il faut partir du principe qu'il est vrai que prefixe(z) < prefixe(x). A partir de ce moment-là:
- si les deux sommets sont dans une même cfc, x n'est pas la racine de cette composante,
- sinon c'est que z appartient à une autre cfc (que celle de x) rencontrée avant. Dans ce cas, la racine Rz de la cfc à laquelle appartient z possède une numérotation suffixe inférieure à la racine Rx de la cfc à laquelle appartient x. Le sommet z bien que successeur de x dans le parcours profondeur de la forêt a déjà été affecté à une précédente cfc.
On peut alors donner une définition de la fonction retour:
retour(x) = min { prefixe(x), prefixe(z), retour(y) }
Ou le retour de x est calculé lors de sa dernière rencontre (ordre suffixe) sur tousles sommets z et y tels que x z est un arc en arrière (figure 9.(a)) ou un arc croisé (figure 9.(b)) et x y est un arc couvrant.
La valeur minimale retournée par retour(x) pour chaque sommet x sera:
- prefixe(x) s'il n'existe pas de chemin de x à z avec un sommet z tel que prefixe(z) < prefixe(x).
- prefixe(z) si le chemin de x à z ne comprend pas d'arcs couvrants.
- retour(y) s'il y a au moins un arc couvrant x y dans le chemin. A ce moment là, le sommet x peut atteindre ce que peut atteindre le sommet y.
Algorithme:
L'évaluation de la valeur de retour pour chaque sommet x se fera récursivement à l'aide d'un parcours profondeur. Le sommet est empilé et sa valeur de retour est initialisé à sa propre valeur préfixe. Cette valeur est éventuellement mise à jour lors des rencontres des successeurs de x (par le biais de leur valeur préfixe ou de leur valeur de retour). A la dernière rencontre du sommet x (ordre suffixe), sa valuer de retour est comparée à sa valeur préfixe. En cas d'égalité, nous sommes en présence d'une nouvelle racine de cfc. En effet ce sommet ne peut atteindre aucun autre sommet du graphe qui se trouverait avant lui lors du parcours en profondeur de ce graphe. Il suffit alors de dépiler tous les sommets encore dans la pile (x compris) pour obtenir les sommets de cette nouvelle cfc.
L'algorithme utilise un certains nombre de tableaux permettant entre autres de mémoriser les valeurs préfixes, les valeurs de retour ou l'appartenance à une cfc de chaque sommet du graphe parcouru.
Pour les algorithmes qui suivent, les types de données employés sont les suivants :
Constantes
Nbs = ... /* Nombre de sommets du graphe */
Types
t_vectNbsEnt = Nbs entier /* Vecteur d'entiers */
Ce qui donne pour l'algorithme principal composantefortementconnexe :
/* Après l'exécution cfc[i] contiendra le numéro de la composante fortement connexe */ /* à laquelle appartient le sommet i, et cptcfc le nombre de cfc détectées */ Algorithme procédure composantefortementconnexe Paramètres locaux graphe g Paramètres globaux t_vectNbsEnt cfc /* Vecteur de composantes fortement connexes */ entier cptcfc /* Compteur de comosantes fortement connexes */ Variables t_vectNbsEnt pref, ret /* Vecteurs de valeur préfixe et retour des sommets */ entier x, cpt /* x:sommet, cpt:compteur préfixe */ pile p /* Pile de sommets */ Début cpt
Pour la procédure parcfc :
/* parcfc(x, g, cpt, cptcfc, p, pref, ret, cfc) où x est le sommet racine, cpt est le compteur préfixe de sommets */ /* cptcfc le compteur de cfc, p la pile de sommets, pref le tableau de valeur préfixe(marque) des sommets, */ /* ret le tableau de valeur de retour et cfc' le tableau tel que de cfc[i] donne la cfc de i */ Algorithme procédure Parcfc Paramètres locaux entier x graphe g Paramètres globaux entier cpt,cptcfc pile p t_vectNbsEnt pref, ret, cfc Variables entier i, y, min /* y est un sommet, min le retour temporaire de x */ Début /* Initialisation et marquage */ cpt
Après exécution de l'algorithme composantefortementconnexe, nous obtenons le vecteur cfc suivant (tableau 13) :
| Sommets (indice) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| N° de composante | 3 | 3 | 3 | 3 | 1 | 1 | 1 | 1 | 1 | 2 |
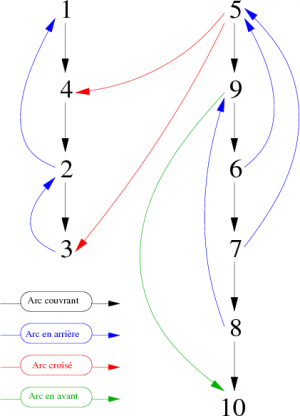
Nous pouvons visualiser le parcours et le mode de calcul des valeurs de retour des sommets du graphe à l'aide de la forêt couvrante représentée en figure 10. On constate trois composantes fortement connexes déterminées par leur racine respective dont les valeurs de préfixe et de retour sont identiques (sommets 1, 5 et 10).

|
Les composantes fortement connexes sont alors les suivantes (cf. figure 11):
|
|
Biconnexité
La biconnexité (2-connexe) est une propriété des réseaux connexes. Cette propriété vérifie le fait que si un sommet du graphe (n'importe lequel) disparait, tous les autres restent en connexion.
Définitions:
- Soit G un graphe non orienté connexe, on dit que G est biconnexe s'il possède au moins 3 sommets et si quel que soit s un sommet de G, le graphe G - {s} est toujours connexe.
- Soit s un sommet de G, on dit que s est un point d'articulation de G (cut-point, articulation point) si le graphe G - {s} n'est plus connexe.
- Soit a une arête de G, on dit que a est un isthme de G (cut-edge) si le graphe G - {a} n'est plus connexe.
Remarque: Un graphe biconnexe ne possède pas de point d'articulation.
On peut voir sur l'exemple de la figure 12.b un graphe non orienté connexe qui n'est pas biconnexe. Il possède 4 points d'articulation: 2, 4, 5 et 7. En effet, si vous enlevez un de ces sommets, vous séparez les sommets restants en deux groupes distincts n'étant plus connectés l'un à l'autre.
| a. 2-connexe | b. non 2-connexe |
|---|---|
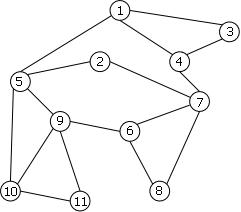
|
|
La 2-connexité est utilisé, entre autres choses, pour tester la vulnérabilité des réseaux. En cas de conflit il suffit de détruire les points d'articulation pour séparer/fragiliser tout un système de communication.
Malheureusement ou heureusement (tout dépend ;)), tous les graphes connexes ne sont pas biconnexes. on s'intéresse alors aux composantes biconnexes du graphe. pour définir les composantes biconnexes, on introduit la notion de bloc.
- un bloc est soit une arête, soit un graphe 2-connexe.
- On appelle C2C (composante 2-connexe) d'un graphe G tout bloc maximal de G. C'est à dire tout bloc de G qui n'est pas strictement inclus dans un autre bloc de G.
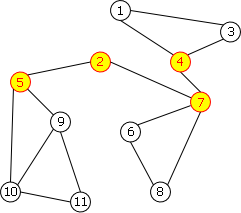
La figure 13 montre l'ensemble des composantes 2-connexes du graphe dela figure 12b.
|
On peut constater que:
- les C2C forment une partition de l'ensemble des arêtes du graphe,
- les C2C sont soit disjointes, soit ont en commun un point d'articulation.
Algorithme:
On se propose de réaliser un algorithme d'extraction des points d'articulations d'un graphe non orienté connexe. Il pourra être modifié pour déterminer les composantes 2-connexes d'un graphe. Ce dernier effectue un seul parcours en profondeur et examine les propriétés des sommets de la forêt couvrante associée au parcours en profondeur du graphe. Cette forêt est réduite à une arborescence, dans la mesure où le graphe est connexe. Elle ne comporte d'ailleurs que deux types d'arcs : couvrant et en arrière le graphe étant non orienté.
L'idée est la suivante : Lorsque l'on supprime un sommet x du graphe G, on coupe la chaîne qui existait entre ses ascendants et ses descendants. La question est : A-t-on perdu pour autant la connexité entre ces derniers ?
Autrement dit : Existe-t-il une chaîne entre les descendants et les ancêtres de x dans le graphe G - {x} ?
Si une telle chaîne existe, elle sera formée d'arcs couvrants en dessous de x et d'un arc en arrière remontant au dessus de x. Nous allons tester cette existence à l'aide d'une fonction plushaut(x) qui donnera pour chaque sommet x le numéro d'ordre préfixe du sommet le plus haut de l'arbre couvrant. Comment : En suivant un chemin, de longueur éventuellement nulle (si le sommet ne peut pas atteindre de sommet placé plus haut que lui), composé d'arcs couvrants suivi éventuellement d'un arc en arrière.
La numérotation préfixe d'un sommet x est obtenu par la fonction prefixe(x).
La fonction plushaut(x) est définie récursivement de la manière suivante :
plushaut(x) = min { prefixe(x), prefixe(z), plushaut(y) }
Ou le minimum (plushaut(x)) est calculé lors de sa dernière rencontre (ordre suffixe) sur tousles sommets z tels que x z est un arc en arrière et sur tous les sommets y tel que x y est un arc couvrant.
Cette définition rappelle celle de la fonction retour(x) de l'algorithme de Tarjan. La différence réside essentiellement dans le fait qu'il n'existe pas d'arcs croisés (le graphe étant non orienté).
Principe de l'algorithme:
L'évaluation de la valeur plushaut pour chaque sommet x se fera récursivement à l'aide d'un parcours profondeur:
- Les valeurs préfixe(x) sont obtenues lors de la première rencontre des sommets x lors d'un parcours profondeur.
- les valeurs plushaut(x) ne sont obtenues que lors de la dernière rencontre du sommet x (en ordre suffixe) puisqu'elles sont déterminées à l'aide des valeurs plushaut et préfixe des successeurs de x.
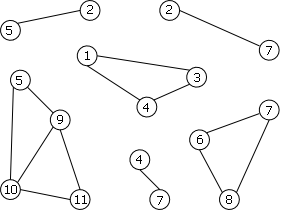
Prenons le graphe non orienté connexe de la figure 14:
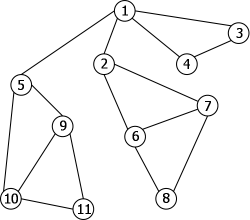
|
L'arbre couvrant associé au parcours profondeur de ce graphe est celui de la figure 15:
|
En analysant l'arbre obtenu ainsi que les valeurs de préfixe et plushaut de chaque sommet, on en déduit qu'un sommet est un point d'articulation s'il satisfait une des deux conditions suivantes :
- x est le sommet racine de l'arbre. S'il a plus d'un fils alors c'est un point d'articulation. En effet, si vous le supprimez, il n'y aura plus de chaîne entre les sommets des différentes branches descendantes de x.
- x n'est pas le sommet racine de l'arbre. S'il existe un sommet y tel que x y est un arc couvrant et que plushaut(y) est supérieur ou égal à préfixe(x) alors x est un point d'articulation. En effet, cela veut dire que l'on ne peut pas atteindre d'ascendants de x depuis y.
L'algorithme utilise des tableaux permettant entre autres de mémoriser les valeurs préfixes et les valeurs de plushaut. Le tableau de préfixe servira à marquer les sommets déjà rencontré et un vecteur père permetrta de savoir si le lien entre deux sommets est un arc retour ou simplement la bidirection père-fils.
Pour les algorithmes qui suivent, les types de données employés sont les suivants :
Constantes
Nbs = ... /* Nombre de sommets du graphe */
Types
t_vectNbsEnt = Nbs entier /* Vecteur d'entiers */
La particularité de ce parcours est de ne pas déclencher du sommet 1 au sommet Nbs, mais du premier au dernier successeur de la racine du graphe (sommet de départ) pour pouvoir déterminer si celle-ci est un point d'articulation ou non. Ce qui donne pour l'algorithme principal pointdarticulation :
/* Construit la liste l des points d'articulation du graphe non orienté g */ /* de Nbs sommets supposé connexe , avec Nbs >= 3 */ Algorithme procédure pointdarticulation Paramètres locaux graphe g Paramètres globaux liste l /* Liste des points d'articulation */ entier nbpa /* Nombre de points d'articulation */ Variables t_vectNbsEnt pref, ph, pere /* Vecteurs de valeur préfixe et plushaut des sommets ainsi que le père */ entier r, x, appel, cpt, i /* r et x:sommets, appel:nombre de fils de r, cpt:compteur préfixe, i:indice */ Début /* initialisation */ pour i
Et pour la procédure parc2c :
Algorithme procédure Parc2c Paramètres locaux entier x graphe g Paramètres globaux t_vectNbsEnt pref, plushaut, pere entier cpt liste l entier nbpa Variables entier i, y, ph /* y est un sommet, ph le plushaut temporaire de x */ booléen detecte /* permet de ne pas traiter plusieurs fois un même PA */ Début /* Initialisation et marquage */ pref[x]
Après exécution de l'algorithme pointdarticulation, si la liste l est vide, cela signifie que le graphe g' est 2-connexe. A l'inverse, nbpa nous permet avant de traiter les points d'articulations contenus dans l d'en connaître le nombre.
La complexité de cet algorithme est celle d'un parcours en profondeur.
extrapolation à la k-connexité
(Christophe "krisboul" Boullay)