Epita:Algo:Course:Info-Sup:Trees Structures
A tree is a set of nodes storing elements in a parent-child relationship with different properties.
Contents |
Binary trees
A binary tree is a recursive structure. It is either a null tree ( Ø ), or a tree that contains a root node and at most two subtrees ( < o, G, D > ) where o is the root node and L and R are two distinct subtrees (respectively left subtree and right subtree).
|
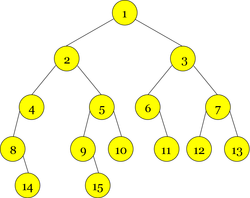
In this example, we have numbered each node to differentiate them. Something important to note is that a binary tree is not necessarily symmetric.
Remark: by convention, trees are drawn growing downwards.
Binary tree Algebraic Abstract Type
types
binarytree
uses
node, element
operations
emptytree :binarytree <_,_,_> : node x binarytree x binarytree
preconditions
root(B) is-defined-iaoi B ≠ emptytree l(B) is-defined-iaoi B ≠ emptytree r(B) is-defined-iaoi B ≠ emptytree
axioms
root (<r,L,R>)=r l(<r,L,R>)=L r(<r,L,R>)=R
with node r binarytree B,L,R
We can notice in blue the necessary operation to get the content of a node. This operation is necessary for a Labeled tree.
Terminology
The handling of binary trees requires the use of appropriate vocabulary. The main elements are:
let <r,L,R> be the binary tree B
- r is the root of B, with no parent node
- L is the left subtree of B
- R is the right subtree of B
- we call left child (right child) of the node ni the root node of the left subtree (right subtree) of the tree rooted by ni
- the link from a parent to a child is called directed-edge. If it is to the left child (right child), we call it the left link (right link)
- if a node nj is the child of a node ni, we say that ni is the parent of nj
- Two nodes that are children of the same parent are siblings
- A node ni is an ancestor of a node nj if it exists on the path from the root to node nj (if ni is either the parent of nj or an ancestor of the parent of nj).
- Conversely, we say that a node ni is a descendant of a nodenj if nj is the ancestor of ni (if ni is either the child of nj or a descendant of the child of nj).
- each node has at most two child nodes
- if a node has one left child (right child), it is a left (right) single internal node
- if a node has two children, it is a double internal node
- A node is an external node if it has no children. It is also called a leaf
- A path from the root to a leaf is called a branch
- A binary tree has as many branches as leaves
- the path obtained by following just the left links (right links) is called left edge (right edge) of B
Remarks: Unlike in real life, binary trees are not varieties of evergreens or deciduous. When I want to delete a leaf, I do. But the most amazing thing is that I create a (leaf) whenever I want. We also forget the notions of family and kinship.
Properties of binary trees
Now we will see operations on trees that calculate various measures and then determine the complexity of algorithms applied to them (the trees of course, what are we talking about ?).
These operations are the following :
- The size of a tree B is the number of nodes of this tree, which is defined by:
| S(B)= | 
|
0 | if B is a null tree (empty) |
| 1+S(l(B))+S(r(B)) | otherwise |
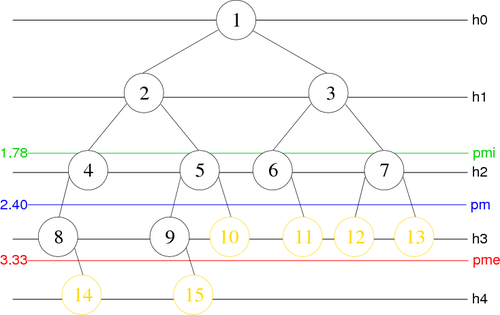
- The depth (level, height) of a node x of a tree B is the distance from the node to the root of the tree, it's defined by :
| D(x)= |
|
0 | if x is the root of B |
| 1+D(y) | if y is the parent of x |
- The height (order) of a tree B is the maximum depth of any node from the root. If a tree has only one node (the root), the height is zero. The height of an empty tree is not defined but could be considered as -1. The height of a tree B is specified by:
H(B) = max(H(x)) where x are the nodes of B
- The path Length (sum of the depth of all the nodes) of a tree B that is defined by:
PL(B) = ΣD(x) where x are all the nodes of B
- The external path length (sum of the depth of all the external nodes) of a tree B that is defined by:
EPL(B)=ΣD(xe) where xe are only the external nodes (leaves) of B
- The internal path length (sum of the depth of all the internal nodes) of a tree B that is defined by:
IPL(B)=ΣD(xi) where xi are only the internal nodes of B
then we have the following relation : PL(B)=EPL(B)+IPL(B)
- The average depth of a tree B that is defined by:
AD(B)=PL(B)/S(B)
- The external average depth of a tree B that is defined by:
EAD(B)=EPL(B)/Nbe where Nbe is the number of external nodes of B
- The internal average depth of a tree B that is defined by:
IAD(B)=IPL(B)/Nbi where Nbi is the number of internal nodes of B
Note : Measures like path length and average depth will be very useful to determine the complexity of algorithms applied to binary trees.
To clarify this, we will use the tree of Figure 1 and specify its characteristics and measurements. For this we will call this tree B and will retain the numbering of the nodes, which gives:
|
- 1 is the root of B, 2 is its left child and 3 its right child |
|
|
- the nodes' depth of B are : |
 2,4
2,4
Particular binary trees
There are particular forms of binary trees. Knowing their specificities allow us to improve the algorithms on these trees using specific algorithms for their structure.
These trees are shown in figure 3 :
| Figure 3. Particular binary trees. | |||
Perfect 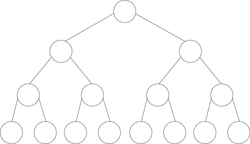
|
Complete 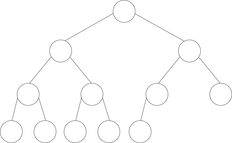
| ||
Full or proper 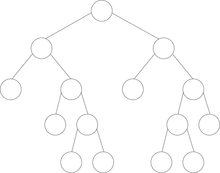
|
Degenerate or filiform 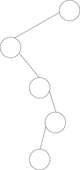
| ||
- A degenerate (filiform) tree is a tree in which for each parent node, there is only one associated child node. This means that in a performance measurement, the tree will behave like a linked list data structure.
- A perfect binary tree is a full binary tree in which all leaves are at the same depth or same level, and in which every parent has two children.(This is ambiguously also called a complete binary tree.)
- A complete binary tree is a binary tree in which every level, except possibly the last, is completely filled. At the deepest level, the height of the tree, all nodes are as far left as possible.
- A full (proper binary) binary tree is a tree in which every node has zero (the leaves) or two children. Sometimes a full tree is ambiguously defined as a perfect tree. There exist particular full binary trees which are called right (left) comb in which all left (right) child are leaves.
Note: This terminology often varies in the litterature, especially with the meaning of "complete" and "full".
Occurrence and hierarchical numbering
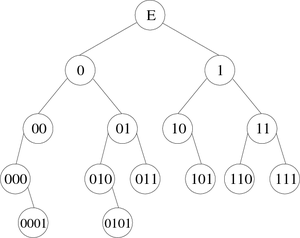
Another way to describe a binary tree is to attribute to each node a word constructed with "0" and "1". This word is named occurrence. By definition the root node is "E" and if a node has for occurrence "m", its left and right children have respectively the occurrences "m0" and "m1".
For the figure 1 tree called B, we would have:
B={E, 0, 1, 00, 01, 10, 11, 000, 010, 011, 101, 110, 111, 0001, 0101}
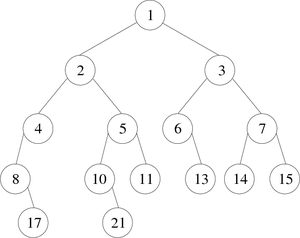
Binary trees can also be represented in breadth-first order. In this arrangement which is called hierarchical numbering, if a node is numbered i, its children are numbered 2 * i (for the left child) and 2 * i + 1 (for the right), while its parent is (if any) numbered i / 2 (assuming the root is numbered one).
For the example of figure 1 this would give :
|
|
Note: We will see later that the hierarchical numbering is very interesting on particular binary trees for an array implementation.
Implementations of binary trees
Like the elementary structures, we have the possibility to implement in memory the trees using dynamic or static representation. The latter may be used to simulate the former.
pointer-based implementation
This representation is virtually a layer of a binary tree. Each node contains an element (label) and two links: one to the left child and the other to the right child. It gives:
Types
t_element = ... /* Definition of element type */ t_tree =t_node /* Definition of t_tree type (pointer on t_node) */ t_node = record /* Definition of t_node type */ t_element elt t_tree lc, rc end record t_node
Variables
t_tree tree
This will give the following structure:
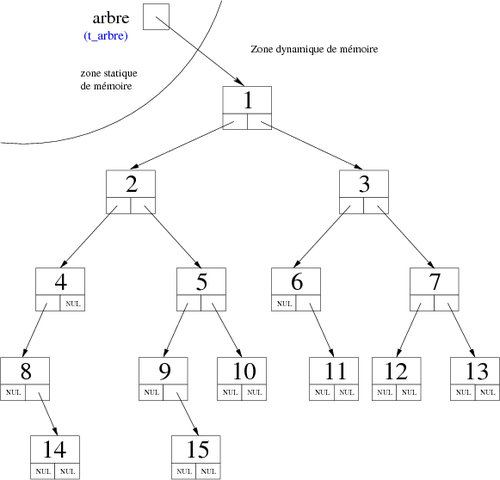
|
In this kind of implementation, the correspondences between the abstract operations and the pointer-based implementation (on a B binary tree) are the following:
| Abstract type | ⇔ | Pointer-based implementation |
| B=emptytree | B=nul | |
B  < _, _, _> < _, _, _>
|
Alloc(B) | |
| root(B) | B
| |
| l(B) | B.lc
| |
| r(B) | B.rc
| |
| Content(root(B)) | B.elt
|
Array implementation
In this representation, the tree will be contained in a vector (one-dimensional array) of records, each with three fields: the element and two integers (one for the left child and the other for the right child). The latter (both integers) referencing the vector index of the child concerned (am I clear enough?). The first index of the vector is 1, then we can use 0 as null pointer reference (the empty tree). We also need the position of the root given by an integer.
Note : When coded in C, it will then use -1, the base being 0.
Here is the declaration of such an algorithmic structure:
Constants
MaxNb = 21
Types
t_element = ... /* Definition of element type */ t_node = record /* Definition of t_node type */ t_element elt integer lc, rc end record t_node
t_vectMaxNbnode = MaxNb t_node /* Definition of t_node vector */ t_tree = record /* Definition of t_tree type */ t_vectMaxNbnode nodes integer root end record t_tree
Variables
t_tree tree
In this kind of implementation, the correspondences between the abstract operations and the array implementation (on a B binary tree) are the following:
| Abstract type | ⇔ | Array implementation |
| B=emptytree | B.root=0 | |
| root(B) | B.root | |
| l(B) | B.nodes[B.root].lc | |
| r(B) | B.nodes[B.root].rc | |
| Content(root(B)) | B.nodes[B.root].elt |
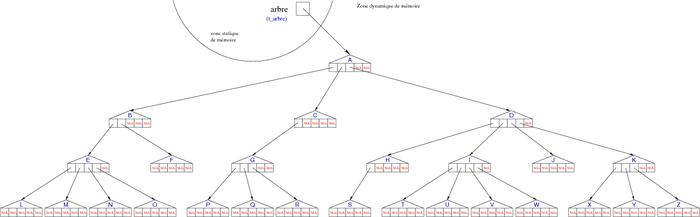
Adapted to the tree of Figure 1, we would have the table in Figure 6 (a). In fact, with this kind of tree, the root may be located in any index. So we can represent several trees at the same time in the same array, a forest for example. We just have to know for each tree where its root is.
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| (a) | (b) | (c) |
If we had used for the same tree, a hierarchical numbering nodes (not labels), we would have obtained this table Figure 6 (b).
This numbering has two major flaws:
- It forces us to fix the root of a non-empty tree to 1
- It generates holes in the table and therefore a relatively low occupancy rate.
That said, it is ideal for complete or perfect trees because all their levels, except the last, are filled, so no holes (Golfers of the World, Sorry).
In addition, the left child of a node ni is a node n2i and the right child is a node n2i+1, therefore we no longer need to reference the left and right children. This allows us to represent the tree using a simple vector of elements as shown in Figure 6 (c).
Remarks :
- We must find a way using the element to reference an empty tree (one possibility is to put the root at the 0 value).
- This representation allows us to know the father of a node without having to memorize it. For a node ni when i>1, this is the node n div 2.
- For a non-empty tree, the root must always be equal to 1.
For this representation (figure 6(c)), the algorithmic declaration would become:
Constants
MaxNb = 21
Types
t_element = ... /* Definition of element type */ t_vectMaxNbnode = MaxNb t_element /* Definition of t_node vector */ t_tree = record /* Definition of type t_tree */ t_vectMaxNbnode node integer root end record t_arbre
Variables
t_tree tree
In this case, the correspondences between the abstract operations and the array implementation would be the following:
| Abstract type | ⇔ | Array implementation (hierarchical numbering) |
| B=emptylist | B.root=0 | |
| root(B) | B.root | |
| l(B) | B.nodes[2*B.root] | |
| r(B) | B.nodes[2*B.root+1] | |
| Content(root(B)) | B.nodes[B.root] |
Traversals of a binary tree
A traversal of a tree is a systematic way of accessing, or "visiting," all the nodes of a tree.
There exist several ways to traverse a binary tree (you should be familiar with them):
- the depth-first traversal (Ooohh…).
- the breadth-first (level-order) traversal (aaaahh…)
The first examines the nodes as far down as possible in the tree (until a node has no children node) and the second processes all nodes of a tree by depth: first the root, then the children of the root, etc.
For the purpose of illustration, it is assumed that left nodes always have priority over right nodes. This ordering can be reversed as long as the same ordering is assumed for all traversal methods.
Depth-first traversal
This traversal is recursive by nature, it is used in maze solving algorithms (the "recursive backtracker" algorithm for example). Very simple: if you're at a wall (or an area you've already plotted), return failure, else if you're at the finish, return success, else recursively try moving in the four directions. Plot a line when you try a new direction, and erase a line when you return failure, and a single solution will be marked out when you hit success. When backtracking, it's best to mark the space with a special visited value, so you don't visit it again from a different direction. In Computer Science terms, this is basically a depth first search. This method will always find a solution if one exists, but it won't necessarily be the shortest solution. In French we call that kind of traversal le parcours profondeur main gauche.
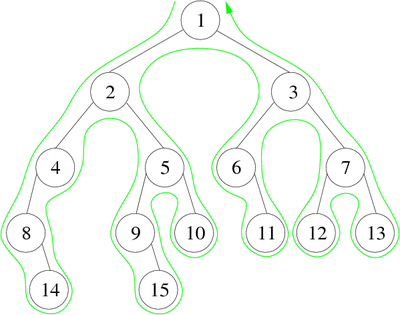
|
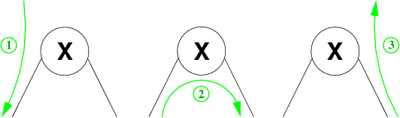
On the traversal of Figure 8, we have not accounted for the empty subtrees but they must be taken into account if one wants to admit that each node (including leaves) are met several times during the course. There are 3 orders induced by the depth-first traversal (see Figure 9) and are called:
- (1) Preorder visit each node before its children,
- (2) Inorder visit left subtree, node, right subtree,
- (3) Postorder visit each node after its children.
|
Depth-First traversal Algorithm
During this traversal, each node is met three times. We can assign to each of them a special processing. Furthermore, if we include the empty trees, we can also specify a special processing for them. It gives the following abstract algorithm that traverses a binary tree recursively:
Algorithm procedure depth-first_parse
Local parameters
binarytree b
Begin
if b=emptytree then
/* end processing */
else
/* Preorder processing */
depth-first_parse(l(b))
/* Inorder processing */
depth-first_parse(r(b))
/* Postorder processing */
endif
End algorithm procedure depth-first_parse
To clearly highlight the differences between the three orders induced by this traversal, we will replace them each time by the following display of the node:
Write(content(root(b))
If for each order we leave the other processes empty and then we apply this algorithm to the binary tree in Figure 8, we would obtain each time:
- (1) Preorder : 1, 2, 4, 8, 14, 5, 9, 15, 10, 3, 6, 11, 7, 12, 13
- (2) Inorder : 8, 14, 4, 2, 9, 15, 5, 10, 1, 6, 11, 3, 12, 7, 13
- (3) Postorder : 14, 8, 4, 15, 9, 10, 5, 2, 11, 6, 12, 13, 7, 3, 1
We note that depending on the type of traversal, the order of nodes differs.
Remarks :
- The hierarchical order, (1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15) for this example, is not visible because it corresponds to a breadth-first (level-order) traversal of the tree.
- All processes can be used at the same time to eventually achieve different things in a different order, or else because these processes are complementary. Thereafter, we will see the need to use several of these processes.
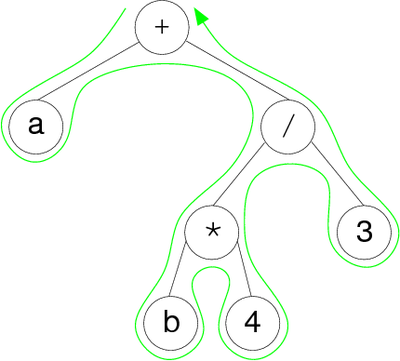
Depth-first traversal of a tree representing an arithmetical expression
We can use a binary tree to represent an arithmetical expression. In this case, the internal nodes store operators and the external nodes store operands. For the arithmetical expression ( a + ( ( b * 4 ) / 3 ) ), we can have the binary labeled tree of figure 10 :
|
Remark: This expression uses only binary operators (with two operands), so it is a full (proper) binary tree.
For the tree of figure 10, the depth-first traversal, depending on orders, gives :
- (1) preorder : + a / * b 4 3
- (2) inorder : a + b * 4 / 3
- (3) postorder: a b 4 * 3 / +
We note that the preorder and postorder are unambiguous. The first corresponding to the Polish notation and the second to the reverse Polish notation (rpn). This is unfortunately not the case for the inorder. Indeed, this series could correspond to different trees as shown in Figure 11.
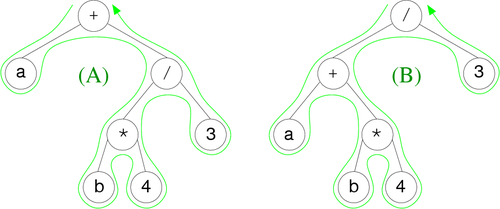
|
Indeed the Polish or reverse Polish notations are preceded or followed by operators of their operands. However for the inorder notation, we don't know if a + b * 4/3 corresponds to a + ((b * 4) / 3 or (a + (b * 4)) / 3. Actually this ambiguity can be easily resolved using parentheses to force the priority of operators.
It suffices to modify the depth-first traversal algorithm previously given as follows:
Algorithm procedure depth-first_inorder_parse Local Parameters binarytree b Begin if l(b)=emptytree and r(b)=emptytree then /* b is a leaf */ write(content(root(b))) /* End processing */ else write('(') /* Preorder processing */ depth-first_inorder_parse(l(b)) write(content(root(b))) /* Inorder processing */ depth-first_inorder_parse(r(b)) write(')') /* Postorder processing */ endif End algorithm procedure depth-first_inorder_parse
That gives for trees given in Figure 11 the two following unambiguous series :
- Figure 11(A) : ( a + ( ( b * 4 ) / 3 ) )
- Figure 11(B) : ( ( a + ( b * 4 ) ) / 3 )
Remark : In the previous algorithm, we could change the test that checks whether the node where we are is a leaf. To do this, it suffices to create an extension to the Binary tree abstract type creating a new operation as follows:
operations
leaf : binarytree
axioms
bemptytree & l(b)=emptytree & r(b)=emptytree
leaf(b)=true
Then the beginning of the algorithm will be :
Algorithm procedure depth-first_inorder_parse
Local Parameters
binarytree b
Begin
if leaf(b) then /* b is a leaf */
Breadth-first (level-order) traversal
The traversal begins at a root node and inspects all the children nodes. Then for each of those children nodes in turn, it inspects their children nodes, and so on.
Remark : This traversal, also called level-order, is iterative by nature.
The Breadth-first traversal uses a Queue to memorize the two children of each node visited. That allows, at the next level, to retrieve them in the meet order. It gives the following algorithm :
Algorithm procedure breadth-first_parse Local parameters binarytree b Variables integer i queue q /* f memorizes the trees */ Begin q
If we apply this algorithm to the binary tree in Figure 8, we would obtain:
1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15
Remarks :
- This algorithm performs the breadth-first traversal of any non-empty binary tree.
- Complexity is the same as the depth-first traversal.
General trees
A tree or general tree is a tree structure where the number of children is not limited to two. The recursive definition of a general tree is A = < o,A1,...,An > where o is the root of A and A1,...,An is a finite list, possibly empty (if n = 0), of disjointed trees. This list is called a forest. We obtain a tree by adding a root to a forest.
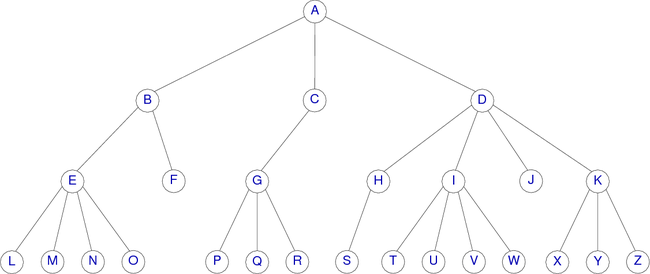
|
General tree Algebraic Abstract Type
types
tree, forest
use
node, integer, element
operations
cons : node x forest
preconditions
insert(f,i,t) is-defined-iaoi 1 ≤ i ≤ 1 + nbtrees(f) delete(f,i) is-defined-iaoi f ≠ emptyforest & 1 ≤ i ≤ nbtrees(f) nth(f,i) is-defined-iaoi f ≠ emptyforest & 1 ≤ i ≤ nbtrees(f)
axioms
root(cons(o,f))=o treelist(cons(o,f))=f nbtrees(emptyforest)=0 nbtrees(insert(f,i,t))=nbtrees(f) + 1 nbtrees(delete(f,i))=nbtrees(f) - 1 1 ≤ i < k
with node o tree t forest f integer i,k
Remarks :
- The "left-right" notion necessary to the binary tree disappears. That said, the vocabulary used for the general trees remains the same except for everything that uses this notion (of generality). For instance we no longer talk about a left or a right child, but about first child, second child and so on and a last child.
- The measurements on the trees are retained (height, path length, size, etc).
Implementations of general trees
There are several kinds of representations of general trees. The most intuitive are the linked-list and the n-tuple representations. Another one, very used, is the leftmost child-right sibling representation (a binary tree).
Vector-based (Array) implementation of general trees
In this case, the set of nodes is represented in a one-dimensional array (vector), oversized to allow us to add nodes if necessary. Each element is a record that contains the label of the node plus a pointer to its children list. The children list consists of records containing two fields : a pointer to a table element and another pointer to the next record (as for graph lists of adjacency). In this case, the algorithmic description would be:
Constants
MaxNb = 27
Types
t_element = ... /* Definition of element type */ t_pchild =
t_node = record /* Definition of type t_node */ t_element elt t_pchild firstchild end record t_node
t_child = record /* Definition of type t_child */ integer childnodenumber t_pchild nextchild end record t_child
t_tree = MaxNb t_node /* Definition of type y_tree (array) */
Variables
t_tree tree
For the tree of figure 12, this would give :
| Figure 13. Vector-based implementation of the general tree of figure 12. |
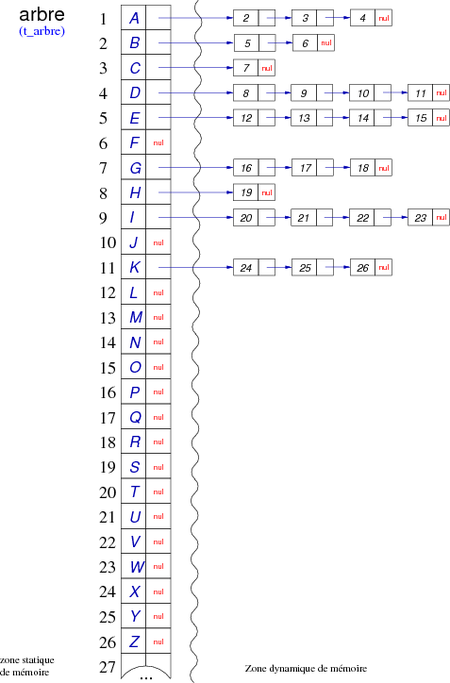
|
Linked-list (pointer) implementation of general trees
Remark : One possibility is to transform this representation to a full dynamic one replacing the vector by a linked list. In this case, nodes are interconnected by a dynamic link (pointer), and thereby in the record t_child the integer childnodenumber (index of the node in the table) is replaced by a pointer to the node address.
That gives the following algorithmic declaration :
Types
t_element = ... /* Definition of element type */ t_pnode =
t_node = record /* Definition of t_node */ t_element elt t_pnode nextnode, prevnode t_pchild firstchild end record t_node
t_child = record /* Definition of t_child */ t_pnode childnode /* pointer to childnode */ t_pchild nextchild /* pointer to next childnode */ end record t_child
t_tree = t_pnode /* Definition of t_tree (pointer to node) */
Variables
t_tree tree
To visualize this structure, it is sufficient to see the adjacency list representation of graphs with a dynamic set of vertices.
Binary trees implementation (left most child-right sibling representation)
The way of representing general trees as binary trees is to use the left link as the left most child and the right link as the next sibling. This representation has several advantages:
- This is a bijective representation : One node in the general tree, one node in the binary tree.
- We can use the algorithms on binary trees (traversal, insertion of node, etc.), that are very simple to implement.
Remark : It seems obvious that this is the pointer-based implementation of a binary tree that is chosen.
The algorithmic description would be:
Types
t_element = ... /* Definition of element type */ t_tree =
Variables
t_tree tree
For the tree of figure 12, this would give :
| Figure 15. left most child-right sibling representation of the tree of figure 12. |
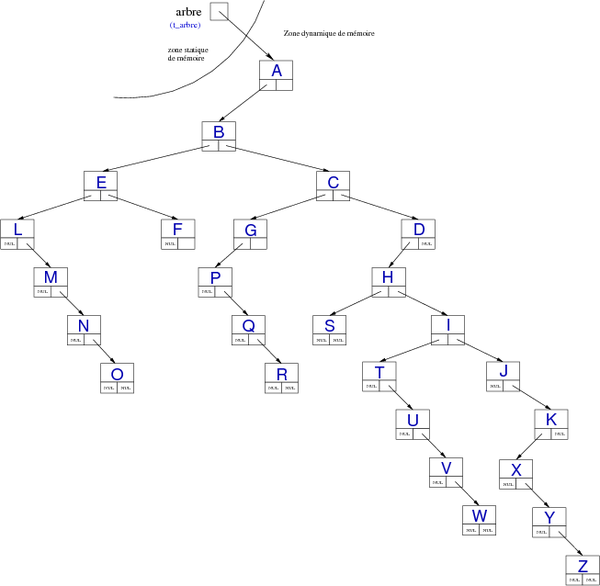
|
Working with this tree is very simple. For example to find the child of a node (in the general tree), it is sufficient from its right child (in the binary tree) to traverse the right edge (always in the binary tree). Similarly, calculating the height of the tree can easily be done in the binary tree by considering only the height of the left child (the first child in the general tree) and not the right siblings (which are located at the same height).
Remarks :
- The corresponding binary tree is not balanced at all.
- The preorder and inorder traversals of the corresponding binary tree will give the same encountering order of nodes as those given by the respectively preorder and postorder traversals of the implemented general tree.
N-tuple representation
If you know the maximum number of children that can have a node, it is possible to represent the tree as N-tuple. This representation is an extension of the dynamic representation of binary trees. Here, the number of children is not two, but one that we have specified (using a constant). Assuming there are five maximum children, the algorithmic declaration would be the following:
Constants
MaxChildrenNb = 5 /* Maximum number of children */
Types
t_element = ... /* Definition of element type */ t_tree =
t_node = record /* Definition of t_node */ t_element elt t_childrentab children end record t_node
Variables
t_tree tree
For the tree of figure 12, this would give :
| Figure 16. n-tuple tree representation of the tree of figure 12. |
|
Traversals of a general tree
As for a binary tree the traversal of a tree is a systematic way of accessing, or "visiting," all the nodes of the tree.
There exist several ways to traverse a tree (you should be familiar with them):
- the depth-first traversal (Ooohh…).
- the breadth-first (level-order) traversal (aaaahh…)
The first (recursive by nature) examines the nodes as far down as possible in the tree (until a node has a no children node) and the second (iterative by nature) processes all nodes of a tree by depth: first the root, then the children of the root, etc.
Depth-first traversal
To traverse a general tree, we can use the same principle as the depth-first traversal of binary trees. The difference lies in the fact that there only two induced orders : there is no inorder traversal, but an intermediate process at each passage of one child to another. In other words, a node is met one time more than its number of children: once before visiting its first child (preorder), once between each child and its right sibling and once when returning from the last child (postorder).
The algorithm used for this traversal is that of the binary tree "slightly modified". Indeed, processes have to be placed inside a loop whose number of iterations depends on the subtree number of the tree that we have to traverse.
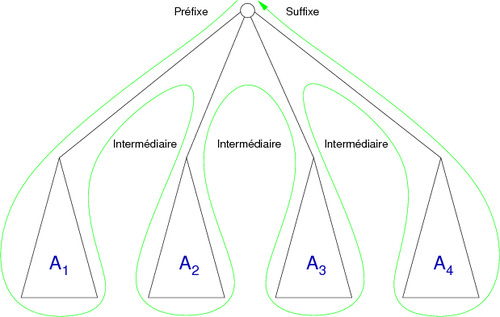
To illustrate this, assume a general tree A = <o, A1, A2, A3, A4>, we get the path of Figure 17 (resembling nothing so much as an x-ray of the hand of Mickey highlighting the presence of an exo-skeleton :D):
| Figure 17. Depth-first traversal of a general tree. |
|
More seriously, it can be seen on this traversal that the root node is visited five times, once when descending toward A1 (preorder process), three times from A1 to A2, A2 to A3 and A3 to A4 (intermediate processes), and finally when returning from A4 (postorder process).
It gives the following abstract depth-first traversal of a tree:
Algorithm procedure depth-first_parse Local parameters tree t Variables integer i, childnb Begin childnb
Remarks :
- We use an additional operation presented with the binary tree abstract data type that is the leaf. This operation should of course be defined as an additional operation of the general tree abstract data type.
- The number of possible treatments of a node is not limited to three, but may actually be equal to the number of children plus one. Indeed, the number of intermediate processes depends on the value of the loop index and therefore allows for a particular treatment each time.
For example, using the general tree of Figure 12, we can list the nodes as follows:
(A(B(E(L)(M)(N)(O))(F))(C(G(P)(Q)(R)))(D(H(S))(I(T)(U)(V)(W))(J)(K(X)(Y)(Z))))
using the following algorithm :
Algorithm procedure depth-first_parse_lisp Local parameters tree t Variables integer i, childnb Begin childnb
that could be optimized in the following way :
Algorithm procedure depth-first_parse_lisp Local parameters tree t Variables integer i, childnb Begin childnb
Breadth-first traversal
The traversal begins at a root node and inspects all the children nodes. Then for each of those children nodes in turn, it inspects their children nodes, and so on.
Actually the traversal is done by distance (level, depth or height in this case), that is to say that we first scan all the nodes at a distance of 1 from the root, then all those that are located at a distance of 2 and so on ...
Remark : This traversal, also called level-order, is iterative by nature.
The Breadth-first traversal uses a Queue to memorize all the children of each node visited. That allows, at the next level, to retrieve them in the meet order. It gives the following algorithm :
Algorithm procedure breadth-first_parse Local parameters tree t Variables integer i queue q /* f stocke les arbres */ Begin q
Using the general tree of Figure 12, we can list the nodes as follow:
A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P, Q, R, S, T, U, V, W, X, Y, Z
Remark : Complexity is the same as the depth-first traversal.
(Christophe "krisboul" Boullay)